Speaker 0 00:00:01 <inaudible>
Speaker 1 00:00:06 I'd like to welcome you to the 83 robot nation podcast today. My name is Jim Beretta, and I'm your host we're broadcasting from Cambridge Ontario today and apex North Carolina and Pasadena, California. I'd like to thank and acknowledge our partner. A three. The association for advancing automation <inaudible> is the umbrella association for the RIA AIA MCMA and 83 Mexico. And these four associations combined represent almost 1300 automation manufacturers, component suppliers, systems integrators, and users, research groups, and consulting firms throughout the world that are driving automation forward. And I'd also like to recognize painted robot there, our partners on the website, and they're also Zoho consultants. I'm very excited today because we have two experts that are involved in the Mars Rover program. And I'd like to introduce Ian stern. Ian stern is from ATI industrial automation. He is the director of force torque sensor products, ATI industrial automation designs and manufacturers, robotic products and accessories that enable customers to achieve a high level of flexibility in robotic automation.
Speaker 1 00:01:19 ATI, robotic end effectors are found in thousands of applications around the world and are manufactured entirely in the USA, indirects the goals and objectives of multiple engineering teams to ensure that HCI is developing world-class fork, torque sensing products. His prior experience at the company as a production engineer afforded him an in depth knowledge of ATI products and process automation. Ian focuses on understanding the capabilities of his force torque sensor and how they're deployed across many industries, overseeing applications, engineering, product development, and manufacturing engineering. He seeks to address the needs of industry customers and the future of automation by expanding ATI force torque product family. He joined HCI in 2007, just after graduating from North Carolina state university with a bachelor of science in mechanical engineering. I'd also like to introduce to you Ryan McCormick. Ryan McCormick is a robotics engineer in the robot vehicles and manipulators group at NASA jet propulsion laboratory or JPL in Pasadena, California. Ryan was the lead engineer for force sensors on the Mars 2020 perseverance Rover. He's now the principal investigator for cold operable lunar deployable arm or cold arm. Ryan joined JPL in 2014 after working in the robotics defense industry. Ryan graduated from the university of Nebraska with a bachelor's and master's degree in mechanical engineering. So welcome gentlemen, welcome to the podcast. Thank you. Thank you very much. Hey sir. No, it's my pleasure. Absolutely. So July 30th is a big day for both of you.
Speaker 2 00:03:00 Uh, can you tell the audience why and how did you get here?
Speaker 3 00:03:04 Yeah, so after many, many years of work, um, you know, July 30th is the targeted launch day for the Mars perseverance Rover. Um, you know, and so we kinda, why did we get here and how we get here from ATI side is that, you know, for 30 years, ATI has been focused on making, you know, industry leading products, um, or robotics, whether it's full changers or forced part sensors. And, you know, we really have a very strong focus on engineering and innovation. And, you know, the, the idea of going to space really presents the ultimate challenge. And we look at that as an opportunity to say, you know, if we can go to space and we can leverage, you know, new technologies to do that, how much better can we make our standard products that we offer many different industries.
Speaker 2 00:03:52 Thanks, Ian. And Ryan, can you tell us a little bit about, uh, tell the audience a little bit about JPL and NASA and the relationship between the two entities?
Speaker 3 00:04:01 Yes. JPL is a NASA center located in Pasadena, California, which focuses on robotics for space. Um, they have a pretty long history of different space, robotics going all the way back to explore one, which was the first U S satellite. They've also sent missions to study all the planets in the solar system, as well as asteroids comments in the moon. Um, they were heavily involved in precursors for the Apollo mission there most recently, they're most famous for the Mars rovers program. So these would include previous rovers, like spirit opportunity and curiosity, which is still running. They also manage the perseverance Rover, which will is what was launching on July 30th.
Speaker 2 00:04:42 Tell us a little bit about perseverance. I mean, we all love the rovers, but what's different about perseverance.
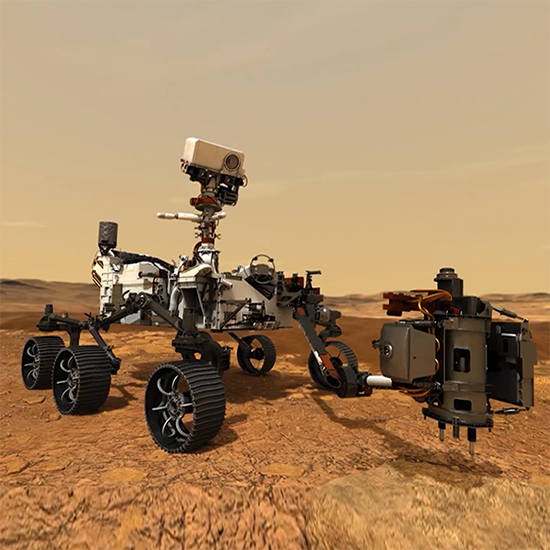
Speaker 3 00:04:49 Perseverance is about a SUV sized Mars. Rovers has six wheels. It will look what like curiosity, but perseverance is the first step at a potential Mars sample return mission campaign. So perseverance is actually going to go and drew and collect rock samples and store these and sample tubes for us to someday bring back to earth that way we can use the best instruments in the world to study these samples, your honor,
Speaker 2 00:05:16 What is ATI this application here, Ian?
Speaker 3 00:05:19 Yeah. So, um, you know, ATI really started this, this idea of going to space about 12 years ago with a, um, NASA has a program called SBAR, which is focused on spurring innovation and small businesses. And so it was kind of the town like our research grant type, um, situation where, you know, one of our engineers found the opportunity, um, popped up in this SBR program to develop a sensor that would go on a Mars Rover. And so, you know, we jumped on that. And so for several years, um, really for the bulk of those, you know, 11 or 12 years was in several
Speaker 4 00:05:58 Different phases of this SBI project where we kind of developed the core technology behind it and proved that we were capable, got the equipment needed to be able to replicate, you know, Marsh and atmosphere and things like that. And so that's really how we, how we started. And so, you know, much like our ports per sensors used are in industrial applications or in surgical robotics, it's all about giving a robotic application or arm, you know, the feel of touch much like a person would have. So that's a, that's the principle. And I think, um, as far as exactly how the sensor is being used on the Rover, um, I'll let Ryan, Ryan dive into that.
Speaker 3 00:06:37 Yeah. So this sensor in particular is used on the end of the sample handling assembly arm, which is located inside the Rover. So there's a big robotic arm on the outside of the Rover, which has a big drill at the end, along with other instruments in that drill, we'll go and collect rock samples into tubes. And then the big arm on the outside will pass the, the tubes back into the Rover where the sample handling assembly arm we'll go and grab the tool tubes and manipulate them. So the force torque sensor on here, it does a few things. One it provides for our protection. So if anything goes wrong, it can catch it early and stop and figure out. We can figure out a way together to, um, get things going back again. But it also allows us to put these tubes into very, very small stations for different operations that go on them, like checking what's in the tube and sealing them. So it gives us a lot of force feedback to controlled, but these in very small areas, one kind of example I give is when you're putting a key into a key slot, you don't necessarily look where the key is. You kind of put it in and then kind of feel what kind of different forces are on your hand with relation to the key. And then you adjust accordingly. And this lets the robot arm inside the Rover, kind of do that with the sample tubes.
Speaker 1 00:07:58 Okay. So we've now used the force torque sensor and the external arm to dig up soil samples on Mars and they're in tubes and they're stored safely. What happens next, Ryan?
Speaker 3 00:08:10 So there are currently looking at concepts for the remainder of a potential Mars sample return campaign. So this would involve sending another Lander to Mars that would have a Rover along with it, they'd go and collect these samples and then load it into a rocket. And that rocket would actually launch off of Mars and an orbiter. It would be flying around Mars, which would actually go and catch the samples. And then once the samples were inside that orbiter, it would clean them and contain them. And then it would actually bring it back to earth. So there are two potential additional missions that would go along with the Mars 2020 mission to get these samples back here.
Speaker 1 00:08:50 When do you think that this could happen for this a mission to go and collect the samples? The current
Speaker 4 00:08:56 Concepts are looking for mid 2020s for launches for both the orbiter and the Lander to then go and bring these samples back. And, and I'll, I'll add one more thing. You know, when, when Ryan was given us a tour around JPL a couple of years ago, and he kind of mentioned this concept of what the future of bringing these samples back to earth is one of the most impressive things to me are kind of mind boggling things to me was that the biggest challenge is that, you know, they'll go and it's not that challenging to put another Rover on, on Mars and get the samples out of, out of this Rover. You'll launch these back up into the atmosphere. And then kind of the idea is that there's this thing floating around in the atmosphere that a rocket has to go and pick up. And so to catch, you know, basically trying to catch a basketball floating around Mars, that's also apparently not challenging, but the, the biological aspects of how do you actually clean and properly decontaminate, you know, that those samples and everything on, on this, um, you know, orbiting a rocket before bringing them back to earth to make sure that we're, we're safe.
Speaker 1 00:10:05 Ian, that sounds like a whole nother podcast.
Speaker 4 00:10:07 It does. And it sounds like a podcast for somebody other than me. So there's no reason that we believe that any of the samples would be hazardous or dangerous, but just to make sure we're going to treat them as such intake, all sorts of precautions to make sure that nothing hazardous comes back into eras biosphere, and there's people at JPL who have worked there working on this for decades. So I think we're in good hands for that. That's great. Thanks, Ryan. Um,
Speaker 1 00:10:38 From ATI, is this your first product going to space or, or maybe this is the first one you're allowed to talk.
Speaker 4 00:10:44 So yeah, so no, it's not the first application that we've had to go into space, you know, I think, but it's the first one that we've done where the sensor exists in either the vacuum of space or kind of referred to as the extra vehicular activity. And so we did a project back in 2012 with NASA as well, um, NASA and GM collaborated to develop, um, what they called robo not. Um, and the idea was, is, um, can we, and they create a robotic aspirin. And so the robot not to platform, um, and this, this robot is it's kinda like the waist up of a human of a humanoid robot. And so it has a torso that has all of the processing power and things in it has two arms. Um, and we have horse torque sensors and in both the shoulders and the wrist of both of the arms on that application, that robot went to the international space station and didn't, um, different testing and things there, but the environment inside of the international space station is extremely different than the one outside of it.
Speaker 1 00:11:50 So what exactly is the ATI technology? The, like we all know about your force torque sensors, but what's, what's different and what's it going to do? And we, we, um, Ryan kind of explained it before.
Speaker 4 00:12:02 Yeah. And so the, the biggest thing with, um, with this application, that in a lot of ways, um, you know, if you go to our website, we have an article up and there's a picture of it. It looks much, much simpler than some of our industrial sensors. So there's, there's no electronics on board. Um, you know, we have products that support every industrial field bus and a lot of ways, this is really about, you know, just taking everything to the extremes from the material of the sensor body, the strain gauges that are on it, that the bonding process, the testing process, everything that we coat all of those materials with and then really the testing and calibration of it. And so, yeah, physically, it looks very simple, but it's really about taking every specification and going to the extremes from calibrating, the sensor at minus 110 degrees C you know, is one example of that.
Speaker 1 00:12:57 Then you must have to make this very light like you, did you start over or were you, was there things that you could learn from Robin? Not that you could put into the Mars Rover?
Speaker 4 00:13:06 So, yeah, we really started from scratch. And so from having redundancy so that we can have, uh, multiple beams and really lose a lot of the strain gauge measurement capability and still be able to measure forces and torques accurately to, you know, how we process it, how we calibrate it. And really everything from start to start to finish is, uh, is different than our normal process.
Speaker 1 00:13:31 You must have had some big constraints on weight as well. Did you?
Speaker 4 00:13:35 Yeah. So, um, you know, wait, when you're, when you're having to launch something that goes into space, wait her too in a lot of ways. And, um, you know, and so one of those is really the, one of the most extreme environments that the sensor ever sees is during the launch of the Rover. Um, and the, the G forces that it sees there. So, you know, the more the sensor weighs, the more load it puts on other components. And so all of the weight associated with that, um, is, is really the extreme example. And Brian, I don't know if you want to elaborate a little bit on the, uh, on the launch loads that we were looking at here. Um, yes, the launch loads are pretty extreme and are amongst the most that we'll ever see during its operation. So the March, 2020 we'll launch on an Atlas five rocket, which is a fairly large rocket to get you all the way to Mars for a payload of this size. And so you're trying to reduce mass and weight as much as you possibly can to get it there.
Speaker 1 00:14:37 Tell some Ryan while we've got you, tell us the journey about designing and building and testing this tool from, from your side of the equation.
Speaker 4 00:14:46 So we work very, very closely with ATI throughout the process. We had weekly meetings with them.
Speaker 3 00:14:52 Um, I also spent a lot of time going back and forth to ATI for helping out with things like testing. So as we kind of talked before, we had to figure out a way to actually test this down to minus one, 10 C and kind of do the normal calibration loads. We normally apply on it, which is something completely different than what ATI normally does as far as temperature. It's challenging to do things for the first time. This is the first time we're having six Xs force torque sensors on Mars. And so we would try things. They wouldn't work out exactly how we planned. So we'd have to kind of go back and figuring out ways to fix them. Um, overall, I spent a few months out in North Carolina throughout this process. Um, some of these include doing 24 hour shifts watching chambers during testing.
Speaker 3 00:15:39 I personally carried the sensors back from JPL, um, on an airplane. And so that was an interesting experience, having a Pelican case with the flight hardware, going back and having to coordinate with, with TSA. And you occasionally got some weird looks from, from people on the planes while the sensors are at ATI. And I was out there, there was a hurricane that was headed straight towards Raleigh, which is kind of rare. So we had to figure out how to save all the hardware for this hurricane and how to try to get back to Pasadena before the hurricane hit back in California, we had experiences with wildfires, closing down roads, um, to get to lab and to get to where the sensors are and having to save them during those times. So we've gone through a lot to get to where we are, but we have a great sensor. Now that's bolted on to the Rover and the rovers about going to Mars.
Speaker 2 00:16:33 Well, that's exciting that that sensor has seen a lot of stuff even before it, before it lifts off. Um, Ian, from your perspective, like what, what have you learned, uh, obviously a lot from the technology and exotic materials and testing,
Speaker 3 00:16:48 What else did you learn? Yeah, just, uh, you know, I think, uh, for us, you know, learning the challenges of going to space and everything that comes with that, and, you know, just really the extreme environments, you, the materials that it takes to do that, you know, things like simple things that you take for granted like an RTV coding that would protect the strain gauges, you know, so there's really very few materials that out have a small enough amount of outgassing that can be used. And so, and these materials are, they're very expensive and they're hard to work with. And then, uh, the temperature extremes, you know, so we hadn't, um, you know, to, to do the calibration of the sensor at minus 110 degrees C you know, we have, we have, uh, we had to put a very large, uh, liquid nitrogen tank outside. And so we have all these hoses running into what is somewhat like our normal calibration equipment. Um, but we have all of these liquid nitrogen hoses running through everything so that we can get the sensor down to temperature and also, still keep it
Speaker 4 00:17:50 Safe for, um, engineers and technicians to be able to do the calibration process around it. So, um, the safety aspects to achieve a lot of these goals, the redundancy is probably the biggest new technology that ATI took away from this, along with the temperature compensation work that we did, but really having the capability to detect failures and still be able to provide accurate force and torque data, um, after this happens. And
Speaker 1 00:18:22 I'm kind of wondering about how big a team that you'd have, like working on this on the ATI side, or did it touch just a lot of different departments?
Speaker 4 00:18:31 No. So really I'm a project. This new in this specialized was done almost exclusively by engineers or engineering technicians. So yeah, at any given time, you know, we, when we actually had sensors here and we were in the testing and calibration process, who would be one or two people from JPL and three or four people from ATI in the lab. And, you know, interestingly enough, Ryan mentioned 24 hour shifts. You know, when we're, when we had these sensors that are potential flight rated sensors. So we make, we made, um, a total of four sensors that could have been the one that went on the Rover that were all equivalent. And so anytime any of these sensors were being tested, it can never be left alone. And, um, and most cases had to be manned by two people. So we would put the sensor in our, a thermal vacuum chamber, which simulates that Martian atmosphere, um, with both temperature and pressure. And it would have to spend, you know, 48 hours in this chamber at the extreme, you know, cycling back and forth in these extreme temperatures. And so we, you know, we had a rotate our engineering team through to monitor all the equipment and make sure that, you know, the sensors were, you know, never saw a temperature, um, or a vacuum level that wasn't within specifications.
Speaker 1 00:19:52 I just wanted to ask a question about data. So you're obviously collecting data because that's what a force torque sensor does. Are you actually receiving any data or is that kind of a silly question?
Speaker 4 00:20:04 Yeah, so, um, through all of these tests, so at no point during all these times, where could we not monitor the sensor's data? So during all of these tests, um, you know, every second we're capturing the data know we're measuring the data from the sensor and recording it. And so we, um, we, we well exceeded the amount of data that can be transmitted by email and have extremely large file transfers back and forth between JPL and ATI with the extreme amounts of data that we have, um, or, or the, or each of the sensors throughout the process.
Speaker 1 00:20:38 Thank you. What's next for the future of space and robotics. And I'll, I'll throw this question to Ryan first.
Speaker 4 00:20:45 So some of the next future
Speaker 3 00:20:48 Missions we're looking at at JPL are some of the bigger ones are Europa clipper, which will go to Europa to study the ocean under a big ice sheet and psyche, which will go to a metal asteroid. There are some concepts for some potential future missions, which are more aligned with things you would use for sensing, for which are landed missions. A big push is for the moon and I'm including pre human precursors for Artemis. So I'm the principal investigator on a project called cold arm, which is a robotic arm can operate that at crowd genic, temperatures. So down at liquid nitrogen temperatures. And so this is targeting a potential 2023 layer of tech demo for that. There's also big areas in, in situ research utilization. So both for prospecting, which is going and finding where these areas are, and then actually using these resources to make useful things for the moon and areas like construction on the moon. So we can kind of do more 24 hour construction there potentially to get things ready for people that go there. There's also a potential ocean worlds missions. So there is a concept for a Europa, a Lander mission that would go to Europa land on their cutting to the ice and see if we could find any signs of life or past life there. Um, there's also areas of looking at, like in sell it to go and land there.
Speaker 1 00:22:13 Well, that's just very exciting. I have to say you've got a very cool robot job, right. Um, Ian, um, what are some of your thoughts about some of the new applications, especially from ATI side unforced, torque and, and, uh, future space?
Speaker 3 00:22:30 Yeah, absolutely. So, you know, we, we definitely, um, as you know, with this kind of this project that helped us develop a lot of this technology be definitely want to be a part of, you know, future space missions. And I think that we we've created a lot of, uh, a lot of capability to be able to do that in the future. Um, you know, both working with, um, JPL and NASA, as well as, you know, other international space agencies around the world, we have several different projects kind of in the works. Uh, the reality is that, you know, all of them take, you know, these projects take many, many years to go from concept to an actual launch state. So, um, more to, more to come from ATI and the force and the space applications. And then really, as we look at, you know, taking all of the technology to the extreme, you start to look at what are the other, um, applications around, you know, on our planet that, um, really need extreme performance and capability. And so things like, uh, deep sea application. So the idea of robotic oil rig maintenance, and as we look at trying to take the next step into clean energy is a, is a re a human race. You know, I think we'll start seeing lot of these offshore
Speaker 4 00:23:46 Oil platforms needing to be shut down. So can we make a forest torque sensor that can operate it 3000 meters depth, you know, in the bottom of the ocean. And there's lots of challenges there, um, kind of on the opposite spectrum of, you know, you're not in a vacuum, you're in an extreme amount of pressure and then a lot of the redundancy and measurement accuracy and things like that are really needed for the robotic surgery market, which is, uh, a big development, you know, there's, uh, there's hundreds of robotic surgery, uh, concepts, you know, around the world. And so lots of, uh, development there and really for sensing, just like it does in the industry, in the industrial world, you know, the idea of you can use vision to see what you're doing, but much like Ryan mentioned with putting a key in a hole, you only use vision to see where the hole is, but the process of actually interacting with your environment, whether that's, you know, on the surface of the moon, the bottom of the ocean or inside of a human is, uh, it's that interaction with the environment where force sensing is critical.
Speaker 4 00:24:48 Yeah. It's a very exciting opportunity. I would like to thank, uh, both Ryan and Ian for taking time out of your day to chat with our audience. Um, how can people get in touch with you? Yeah, I, um, I'm happy for people to email, um, myself in dot
[email protected] or reach out to me on, on LinkedIn. And I can be
[email protected]. Well, thank you very much. Both of you. If you liked this podcast, please rate us wherever you find your podcast. A couple of stars means a lot. If you have an idea or interesting company or technology, or you'd like to be a guest or nominate someone to be a guest, please send me a direct message on LinkedIn. Again, that's Jim Beretta, and we'll see you next time. Thanks for listening. Be safe out there. Today's podcast was produced by customer attraction, industrial marketing, and I'd like to thank my nephew, Chris gray for the music, Chris Colbin for the auto production, my partner, Janet, and our partners. <inaudible> the association for advancing automation and painted robot, our web search and Zoho integration partner located in Tavistock, Ontario
[email protected].
Speaker 0 00:26:04 <inaudible>.